ORIENTAL MOTOR U.S.A. Corp.
570 Alaska Avenue
Torrance, CA 90503
1-800-GO-VEXTA (468-3982)
ORIENTAL MOTOR U.S.A. Corp.
570 Alaska Avenue
Torrance, CA 90503
1-800-GO-VEXTA (468-3982)
Return Policy |
- This product cannot be cancelled or returned once the order has been processed. |
Product Line |
- VEXTA® |
Motor Type |
- 5-Phase |
Frame Size |
- 1.65 in |
Motor Length |
- 3.31 in. |
Speed-Torque Characteristics |
-
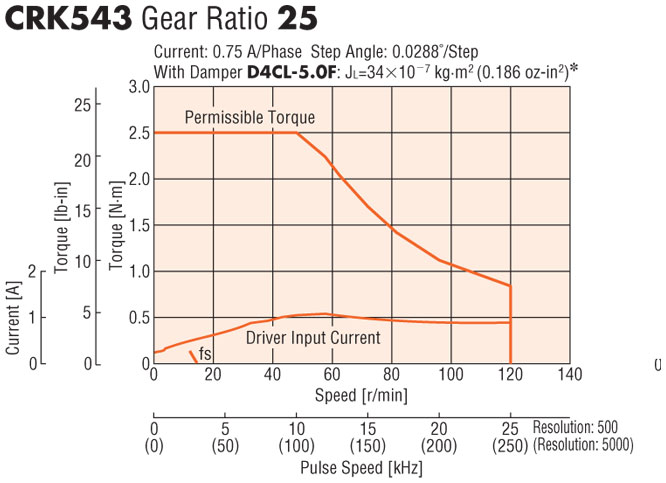 Speed-Torque Characteristics |
Holding Torque |
- 350 oz-in |
Type |
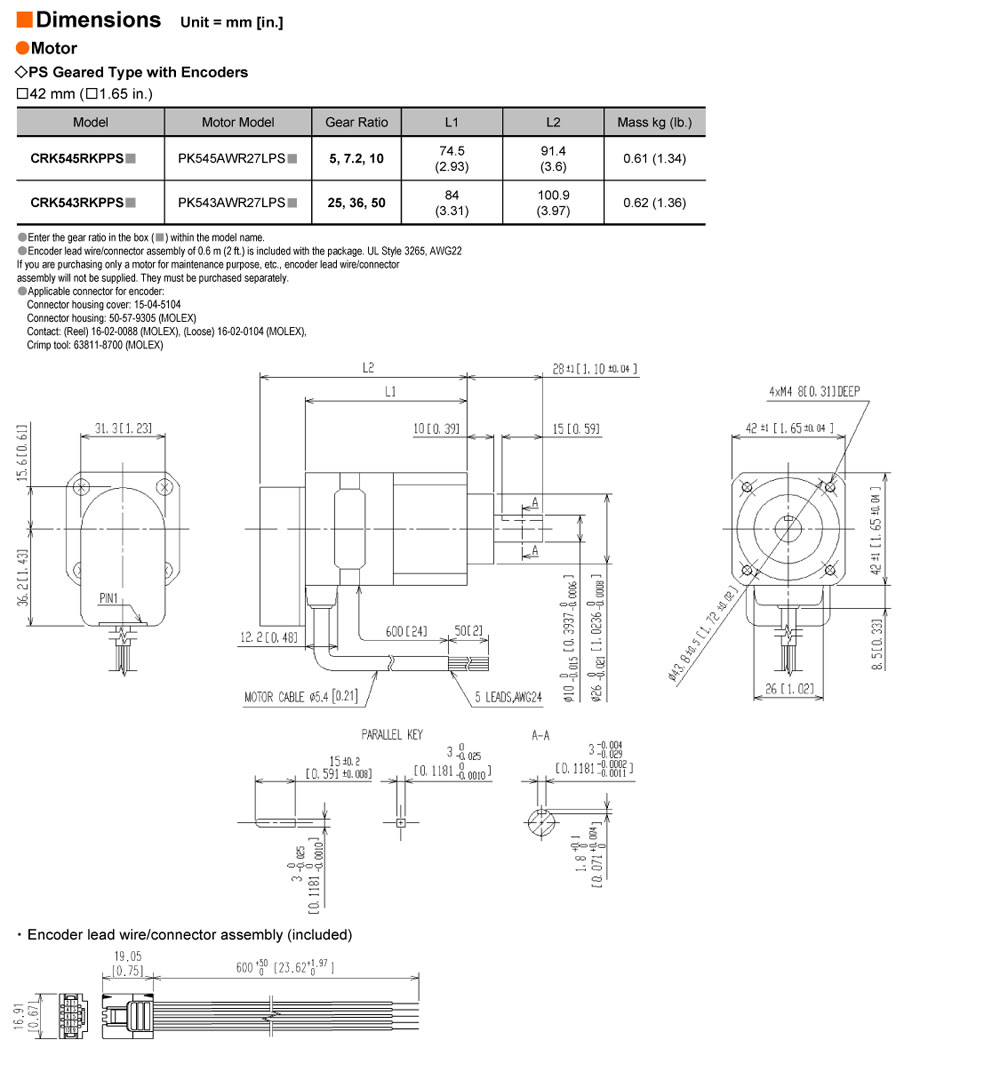
- Geared |
Shaft/Gear Type |
- Planetary Gear |
Gear Ratio (X:1) |
- 25 :1 |
Backlash |
- 10 arc min (0.17º) |
Electromagnetic Brake |
- Not Equipped |
Shaft |
- Single |
Power Supply |
- 24 VDC |
Current |
- 1.4 A |
Basic Step Angle |
- 0.0288º |
Permissible Speed Range (r/min) |
- 0 ~ 120 |
Rotor Inertia |
- 0.191 oz-in² |
RoHS Compliant |
- Yes |
Safety Standards |
- CE |
CE Marking |
- EMC Directives |
Components |
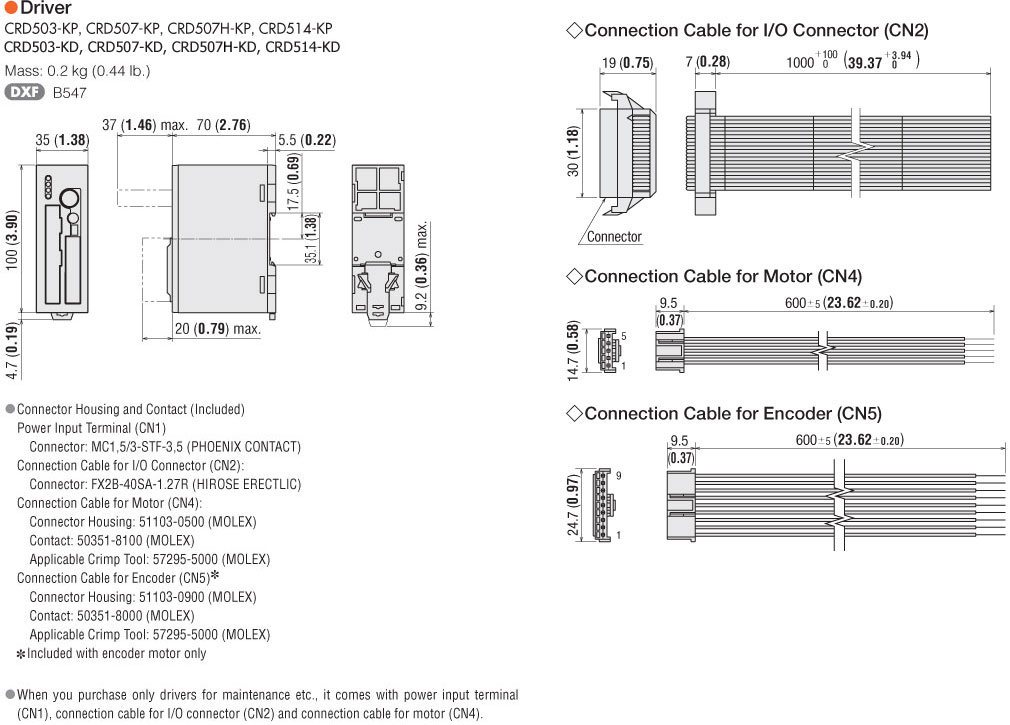
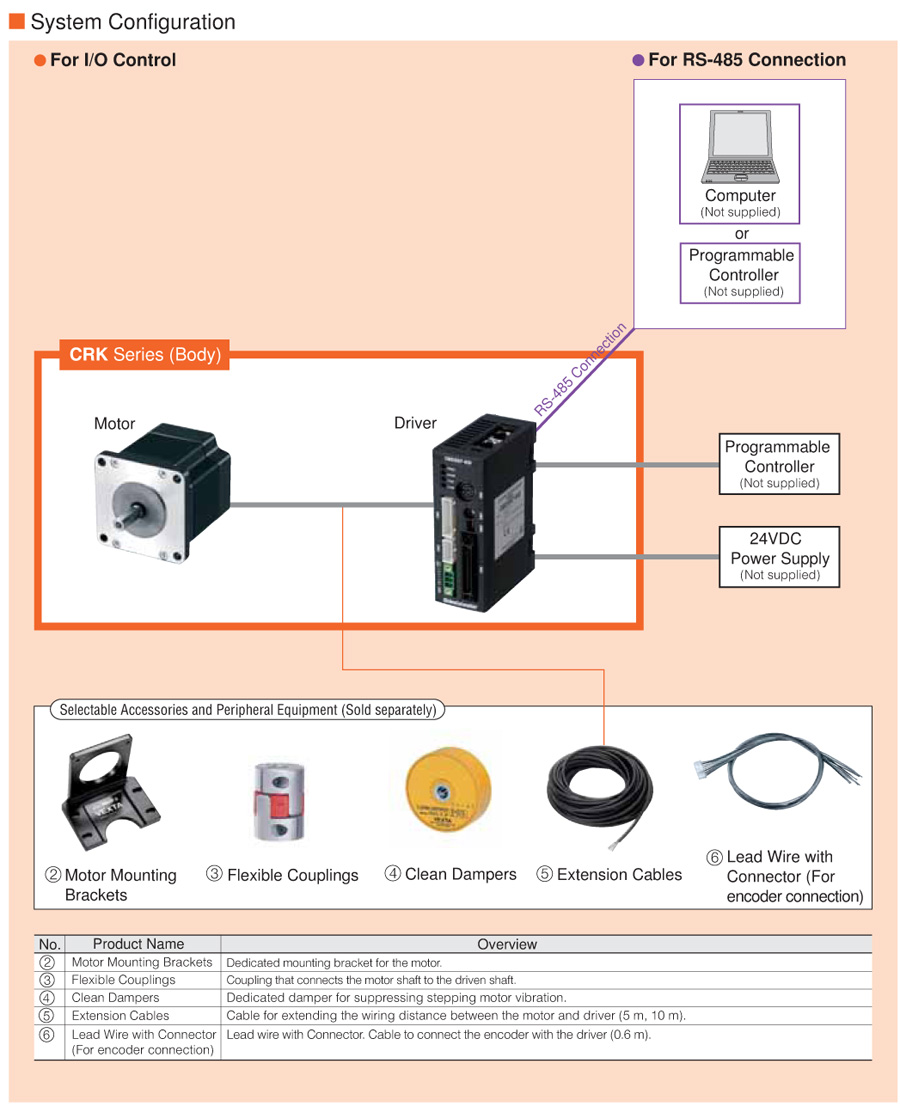
- PK543AWR27LPS25 (Motor) CRD507-KP (Driver) |
Insulation Resistance |
- [Motor] 100 MΩ or more when 500 VDC megger is applied between the windings and the case under normal ambient temperature and humidity. |
Dielectric Strength |
- [Motor] Sufficient to withstand 1.0 kVAC at 50 Hz or 60 Hz applied between the windings and the case for 1 minute under normal ambient temperature and humidity. |
Dielectric Strength (Driver) |
- [Driver] Sufficient to withstand the following for 1 minute under normal temperature and humidity: FG terminals – Power input terminal - 500 VAC, 50 or 60 Hz |
Insulation Class |
- [Motor] Class B [266ºF (130ºC)] |
Ambient Temperature Range |
- [Driver] 32ºF ~ 104ºF (0ºC ~ 40ºC) (nonfreezing) [Motor] 14ºF ~ 122ºF (-10ºC ~ 50ºC) (nonfreezing) |
Ambient Humidity |
- 85% or less (noncondensing) |
Operating Atmosphere |
- No corrosive gases, dust, water or oil. |
Temperature Rise |
- [Motor] Temperature rise of the coil measured by the Change Resistance Method is 144ºF (80ºC) or less (at rated current, at standstill, five phases energized). |
Shaft Runout |
- 0.002 in (0.05 mm) T.I.R. at top of output shaft |
Concentricity |
- 0.003 in. (0.075 mm) T.I.R. |
Perpendicularity |
- 0.003 in. (0.075 mm) T.I.R. |
Stop Position Accuracy |
- ±5 arc minutes (±0.084º) |
Radial Play |
- 0.001 inch (0.025 mm) max. of 1.12 lb. (5 N) |
Axial Play |
- 0.003 in (0.075 mm) max. of 2.2 lb. (10 N) |
Radial Load |
- 0 in. from Shaft End = 24 lb0.2 in. from Shaft End = 28 lb0.39 in. from Shaft End = 33 lb0.59 in. from Shaft End = 41 lb |
Axial Load |
- 11.20 lb |
Number of Sequences |
- 64 maximum |
Input Method |
- ASCII commands via RS-485 |
Frequency |
- 1 to 500,000 pps (1 step increments) |
Linked Motion |
- 4 linked motions, maximum |
Communication Method |
- In conformance with EIA-485 |
Transmission Rate |
- Selectable from 9600, 19200, 38400, 57600, 115200 bps |
Number of Multi-Dropped Devices |
- 16 |
Encoder Inputs (A, B, Z) |
- Line Driver inputs, 26C231 equivalent |
Encoder Type |
- Incremental |
Encoder Resolution (P/R) |
- 500 |
Input Current (mA) |
- 57 (Typ.) |
Input Voltage (V) |
- 5 |
Output |
- 3-Channel A, B, Index |
Output Type |
- Differential |
Output Voltage (Low) |
- 0.4 VDC, 20 mA |
Output Voltage (High) |
- 2.4 VDC, -20 mA |
Response Frequency (kHz) |
- 300 (Max.) |