ORIENTAL MOTOR U.S.A. Corp.
570 Alaska Avenue
Torrance, CA 90503
1-800-GO-VEXTA (468-3982)
ORIENTAL MOTOR U.S.A. Corp.
570 Alaska Avenue
Torrance, CA 90503
1-800-GO-VEXTA (468-3982)

| Items |
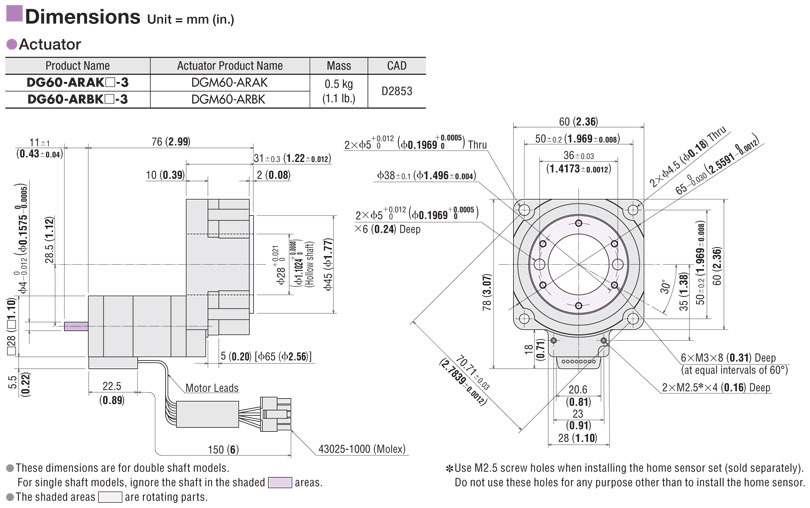
 DGM60-ARAK Hollow Rotary Actuator Web Price $1,066.00
|
DGM60-ARBK Hollow Rotary Actuator Web Price $1,068.00
|
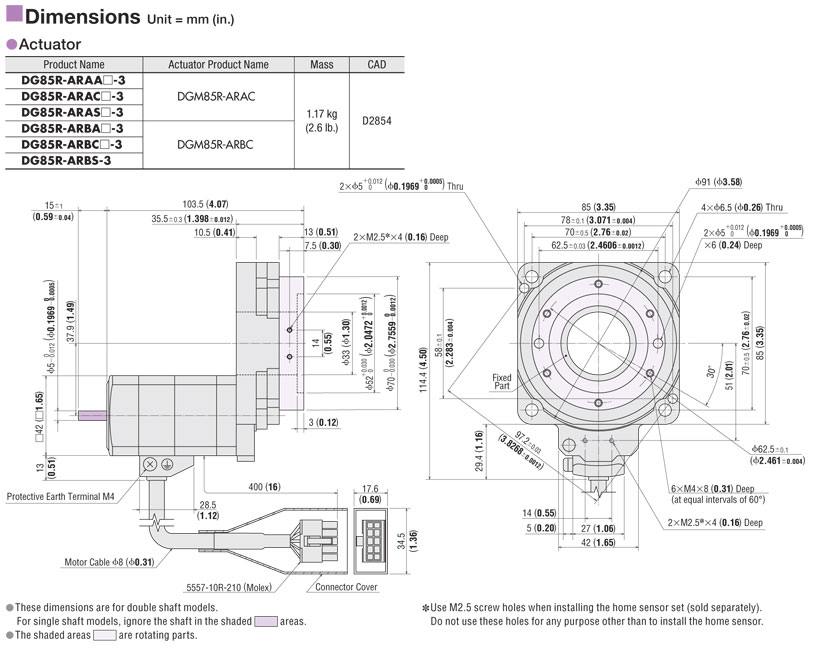
 DGM85R-ARAC Hollow Rotary Actuator Web Price $1,887.00
|
DGM85R-ARBC Hollow Rotary Actuator Web Price $1,890.00
|
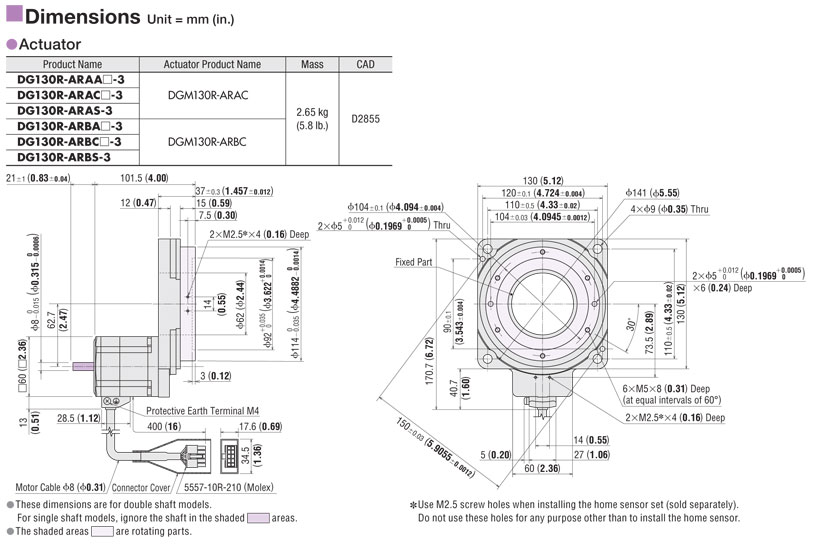
 DGM130R-ARAC Hollow Rotary Actuator Web Price $2,149.00
|
|||||
| Frame Size | 2.36 in | 2.36 in | 3.35 in | 3.35 in | 5.12 in | |||||
| Shaft | Single | Double | Single | Double | Single | |||||
| Electromagnetic Brake | Not Equipped | |||||||||
| Output Table Supporting Bearing | Deep-Groove Ball Bearing | Deep-Groove Ball Bearing | Cross-Roller Bearing | Cross-Roller Bearing | Cross-Roller Bearing | |||||
| Permissible Torque | 7.9 lb-in | 7.9 lb-in | 24 lb-in | 24 lb-in | 106 lb-in | |||||
| Inertia | 24 oz-in² | 24 oz-in² | 121 oz-in² | 121 oz-in² | 820 oz-in² | |||||
| Permissible Speed Range (r/min) | 200 | |||||||||
| Gear Ratio (X:1) | 18 :1 | |||||||||
| Max. Holding Torque | 3.9 lb-in | 3.9 lb-in | 15.90 lb-in | 15.90 lb-in | 106 lb-in | |||||
| Angular Transmission Accuracy | 4 sec (0.067º) | 4 sec (0.067º) | 4 sec (0.067º) | 4 sec (0.067º) | 3 sec (0.05º) | |||||
| Permissible Thrust Load | 22 lb | 22 lb | 112 lb | 112 lb | 450 lb | |||||
| Permissible Moment Load | 17.7 lb-in | 17.7 lb-in | 88 lb-in | 88 lb-in | 440 lb-in | |||||
| Runout of Output Table Surface | 0 in. | |||||||||
| Runout of Output Table Inner (Outer) Diameter | 0 in. | |||||||||
| Parallelism of Output Table | 0 in. | |||||||||
| Degree of Protection | [Actuator] IP40 (IP20 for motor connector) [Driver] IP20 | [Actuator] IP20 [Driver] IP20 | [Actuator] IP40 (IP20 for motor connector) [Driver] IP20 | [Actuator] IP20 [Driver] IP20 | [Actuator] IP40 (IP20 for motor connector) [Driver] IP20 | |||||
| Dimensions |
|
|
|
|
|
|||||
| Power Supply | DC Input | DC Input | AC Input | AC Input | AC Input | |||||
|
|
||||||||||
{kind=link}
{kind=link}
{kind=link}